Sterownik giętarki.
1.Zasada
działania.
Definiowanie poprawki sprężystości.
Definiowanie ilości kroków.
Wprowadzanie wartości kątów dla każdego kroku.
Możliwość werotwania wprowadzonych danych i ich poprawiania.
Start przekaźnika który steruje maszyną.
Awaryjne zatrzymanie maszyny.
Wykonywanie sekwencyjne każdego kroku z zatrzymaniem maszyny w celu zmiany położenia rury.
Każdy krok może być powtórzony.
Możliwość cofania się o dowolną ilość kroków.
Po zakończeniu cyklu n-kroków możliwość ponowienia programu gięcia dla nowej rury.
Przykłady działania.
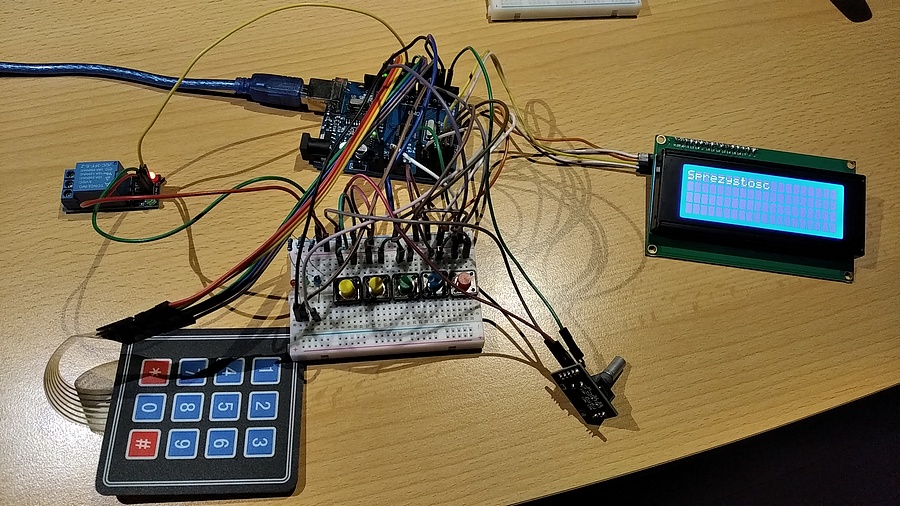
Układ testowy sterownika.
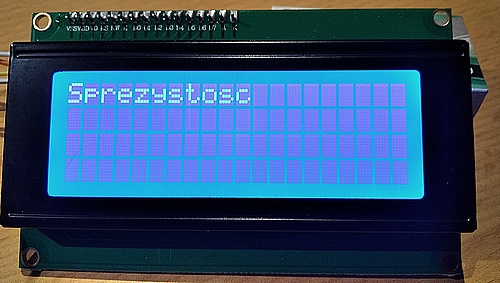

Definiowanie poprawki spręzystości.
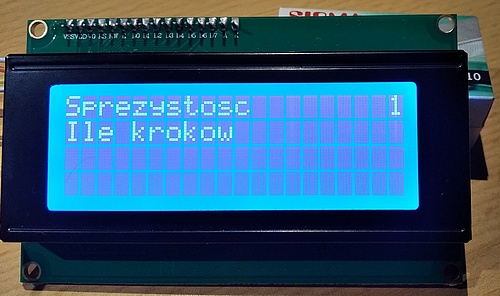

Definiowanie liczby kroków
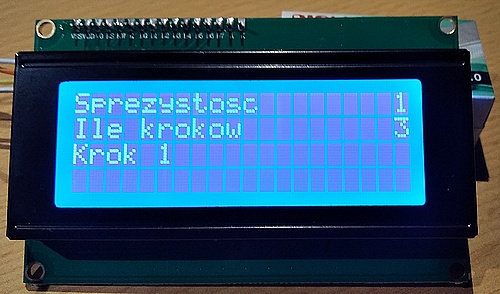

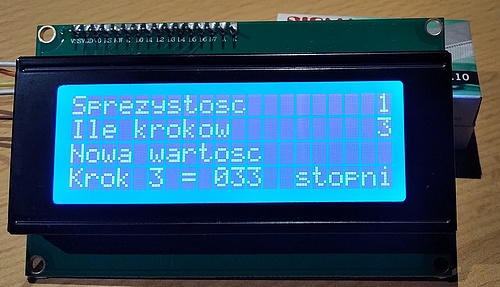
Podanie wartości kąta dla poszczególnych kroków.
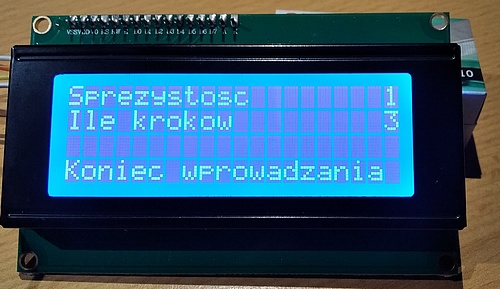
Zakończenie wprowadzania danych.
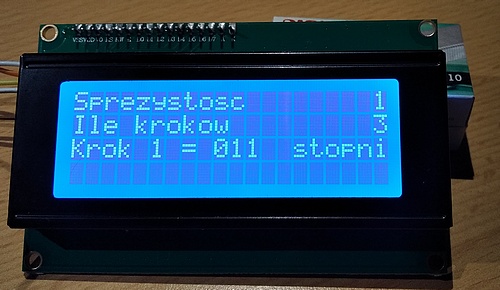
Po zakończeniu wprowadxzania danych przyciskami Góra/Dół możliwość
wertowania wprowadzonych danych i ich poprawianie po naciśnięciu
przycisku Popraw.
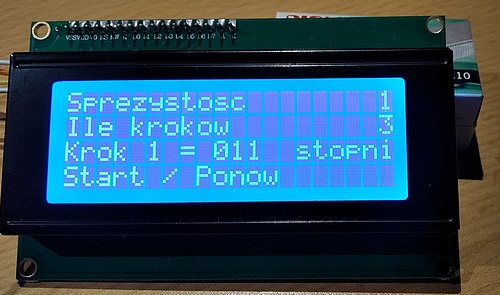
Rpzpoczęcie pracy sterowmnika po naciśnięciu przycisku Start.
Po wykonaniu każdego kroku oczekiwanie na ponowny Start lub ponowienie
kroku. W trybie pracy maszyny ponowienie kroku odbywa się po
naciśnięciu przycisku Popraw.
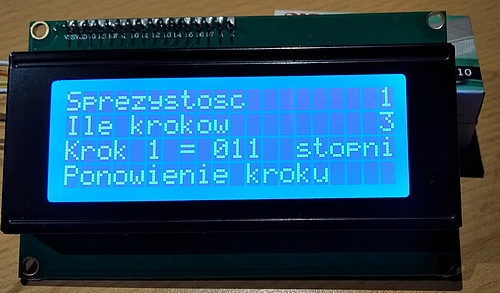
Krok ponownie wykonany.
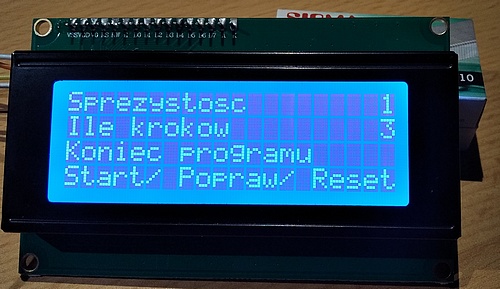
Po wykonaniu wszystkich kroków możliwość ponownego staru, sprawdzenie i
ewentualnego poprawienia wartości kątów przez wertowanie wpisów
przyciskami Góra/Dół lub powrotu do początku programu przyciskiem Reset.
|
|
|
